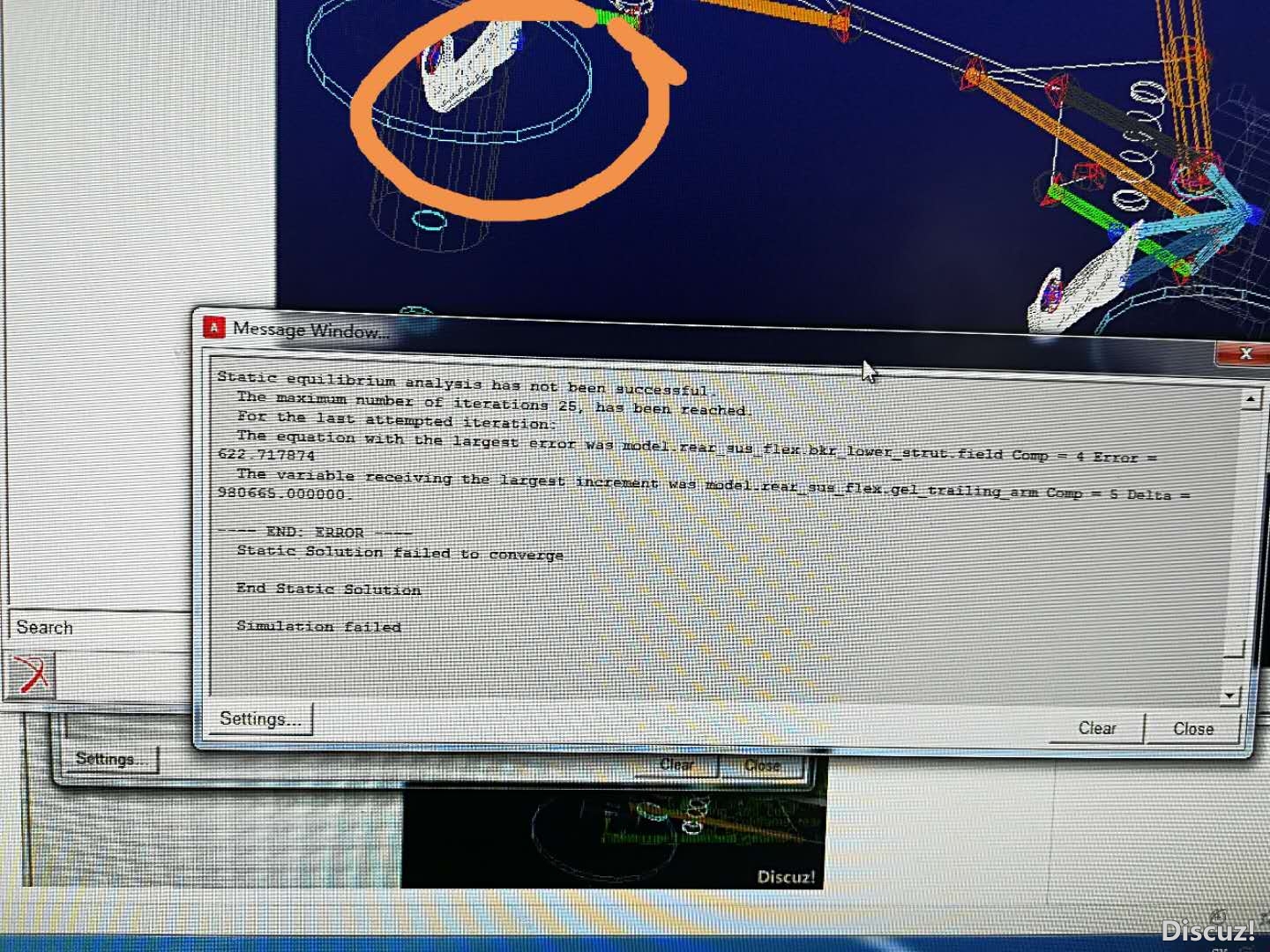
多连杆悬架仿真时报错,纵臂做成刚性体时,悬架能计算通过,做成柔性体时,计算报错!求大神帮忙解决。RELOAD from xxcarxx_11819634.sav successful. System time is now 0
command: deactivate/joint, id=18,17
Deactivated model.testrig.jorrev_table_tilt_joint, force/torque values will be zero in function-expression references.
Deactivated model.testrig.jolrev_table_tilt_joint, force/torque values will be zero in function-expression references.
command: deactivate/jprim, id=6,5
Deactivated model.testrig.josinp_right_tilting_table, force/torque values will be zero in function-expression references.
Deactivated model.testrig.josinp_left_tilting_table, force/torque values will be zero in function-expression references.
command: control/ routine=acarSDM::con950, function=user(950,39,41,1,2,18,20,1,3,2,3,38,40,2,3,28,30,3,1,0,0,0)
Begin Static Solution
---- START: ERROR ----
The Initial Conditions displacement solution failed. Adams/Solver could
not determine the initial assembled position configuration of the model.
1)Try increasing the number of iterations for convergence. Current value: 25.
2)If redundant constraints are present try to eliminate as many as possible.
3)Make sure prescribed motions are consistent with other aspects of the
current model position.
4)Check to see if joints are inconsistent (contradictory); eliminate them
if so.
5)Check to see if parts are not too distant from an assembled configuration.
6)Check to see if GCONS have expressions that are singular at the current
system configuration. This can happen if a GCON's expression contains the
THETA or PITCH functions.
---- END: ERROR ----
|
|
|

